

Während wir weiter auf unsere Registrierung warten habe ich mich mal wieder beim Werkeln gefunden. Um zu erklären, was gerade so anfällt muss ich etwas ausholen, daher habe ich diesen Artikel in eine andere Kategorie gestellt und berichte in dieser über schwierigere und leichtere Operationen an der Bordtechnik. Heute geht es um die Informationen die man zur Navigation und zum Steuern eines Bootes so benötigt. Vorbei sind die Zeiten, als man die Position des Bootes mit dem Sextant, die Wassertiefe mit dem Bleilot und die Geschwindigkeit mit der Logge bestimmt hat.
Heute verwendet man Sensoren, die z.B. die Windgeschwindigkeit und -richtung messen oder die Tiefe mittels Echolot bestimmen. Diese Daten können an geeigneten Ausgabegeräten abgelesen werden und erleichtern die Navigation durch höhere Genauigkeit und Geschwindigkeit der Messvorgänge. Aber wie kommen diese Daten nun zur Ablesung? Dafür gibt es Kabel von den Sensoren zu den Ablesegeräten. Vor einigen Jahren noch hat hier jeder Hersteller sein eigenes Format entwickelt und Geräte waren nicht untereinander kompatibel. Seit 1983 hat die NMEA (National Marine Electronics Association) einen Standard (NMEA 0183) definiert zur Vereinheitlichung dieser Datenübertragung. Seit 2000 wurde der aktuelle Standard NMEA 2000 vorgestellt, der das Konzept des alten Standards um Netzwerkfunktionen erweitert.
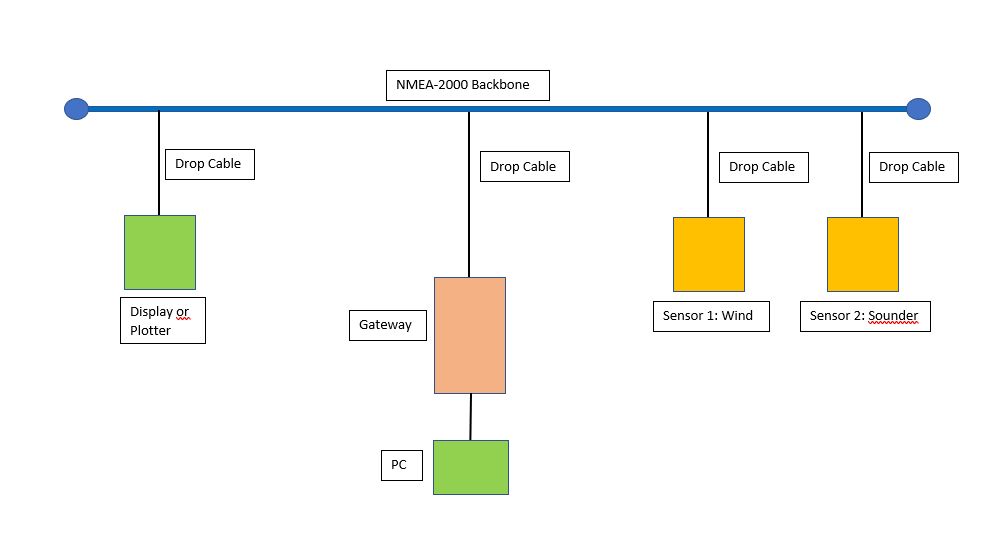
Eine NMEA 2000 Installation besteht aus einem langen Kabel (Backbone, siehe Abb. 1) an welches Geräte mit einem T-Stück und Zwischenkabeln (Dropcable) angeschlossen werden. Die Kabel bestehen aus zwei Datenleitungen und einer Stromversorgung für angeschlossene Geräte. Sensoren senden ihre Daten auf diesem Kabel mit 250 kBit/s und alle angeschlossenen Geräte können diese Daten „sehen“ und bei Bedarf verarbeiten. Z.B. kann die vom Echolot gesendete Wassertiefe auf dem Kabel sowohl von einem Kleindisplay als auch vom Plotter verarbeitet und angezeigt werden.
Auf Tanuki sind am NMEA 2000 Bus folgende Geräte angeschlossen (Abb. 2): Garmin GWS10 (Windsensor), Airmar DST200 (Tiefensensor und Logge), Garmin GHC20 (Autopilot Bedienungseinheit) und Garmin GHP12 (Autopilot).

Da wir auf Tanuki keinen Multifunktionsplotter sondern einen Bordcomputer verwenden, müssen die Daten vom NMEA Bus zum Computer kommen. Hierfür verwenden wir einen Konverter (ein sogen. Gateway) welche diese Daten auf ein reguläres Computernetzwerk (Ethernet) transferiert.
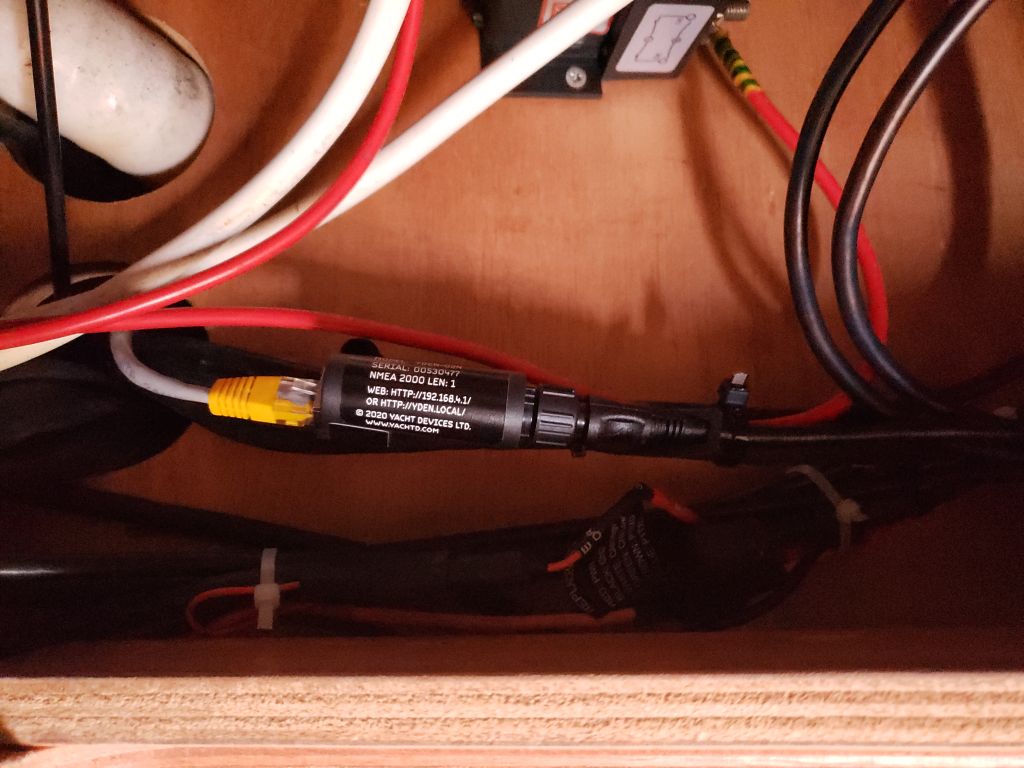
Nachdem das bestehende NMEA 2000 Netzwerk von mir in der Nähe des Autopiloten identifiziert wurde, habe ich die Kabelbäume etwas aufgedröselt und mittels der T-Stücke den Backbone identifiziert. Zu meiner größten Freude habe ich dabei ein verwaistes Dropcable gefunden und musste für mein Vorhaben nur noch ein weiteres T-Stück einfügen (Abb. 3-4). Als Gateway verwenden wir ein Gerät von Yacht Devices (YDEN-02N) welches ich mit einem kurzen Dropcable an den Backbone angeschlossen habe (Abb. 5-6). Von da an geht es mit 12m Ethernet Kabel an den Switch des bordinternen PC-Netzwerks. An das „gefundene“ 5m Dropcable habe ich ein weiteres 10m Kabel angeschlossen (man kann diese Kabel zusammenstecken) und es an die Navi-Ecke gefädelt um das AIS an NMEA 2000 anzuschließen. Die Arbeitszeit für das Kabelverlegen war ungefähr 3 Stunden, Netzwerkkonfiguration etwa 1 Stunde……



Was ist nun das Ergebnis dieser Installation? Das AIS ist mit dem Backbone verbunden, also liegen auch alle Daten über Schiffspositionen und über die eigene GPS-Position auf dem NMEA-2000. Alle Daten vom Backbone werden nun über das Gateway auf das bordeigene PC-Netzwerk übertragen. Das Gateway kann nun im OpenCPN als Datenquelle angegeben werden (Abb. 7). Damit steht dem Programm die gesamte Datenfülle aller nautischen Sensoren zur Verfügung.

Als Ergebnis werden im OpenCPN zunächst alle AIS-Positionen auf der Karte angezeigt und die Ausrichtung des Bootes (gestrichelte rote Linie) ebenfalls korrekt eingetragen (Abb. 8). Zusätzlich können die Daten des NMEA 2000 Netzwerks über ein zweites Fenster grafisch dargestellt werden (Abb. 9).


Die Anzeige des Bord PCs an der Nav-Station (Abb. 10) kann nunmehr zum externen Monitor am Steuerstand gespiegelt werden (Abb. 11).


25/03/2022 um 11:05
Ein Buch mit 7 Siegeln (oder mehr) fuer mich.
Bin stolz auf Dich👏